

67070009

67070043

67070046
67070211
Using a gyroscope or IMU sensor (e.g., MPU6050) to measure angular velocity and determine the number of reps performed in exercises such as dumbbell curls or barbell lifts, with the data analyzed in a web application.
โปรเจกต์นี้เป็นระบบนับจำนวนการออกกำลังกายอัตโนมัติ โดยใช้เซนเซอร์ MPU6050 ร่วมกับบอร์ด Arduino UNO R4 WiFi เพื่อตรวจจับการเคลื่อนไหวของผู้ใช้งานระหว่างการออกกำลังกายแบบ Dumbbell และ Barbell และส่งข้อมูลขึ้น MQTT Server เมื่อระบบตรวจจับการยกครบ 1 ครั้ง จะเพิ่มจำนวนครั้งของการยกและส่งข้อมูลผ่าน Wi-Fi ไปยังเว็บไซต์

Arduino UNO with built-in Wi-Fi/Bluetooth
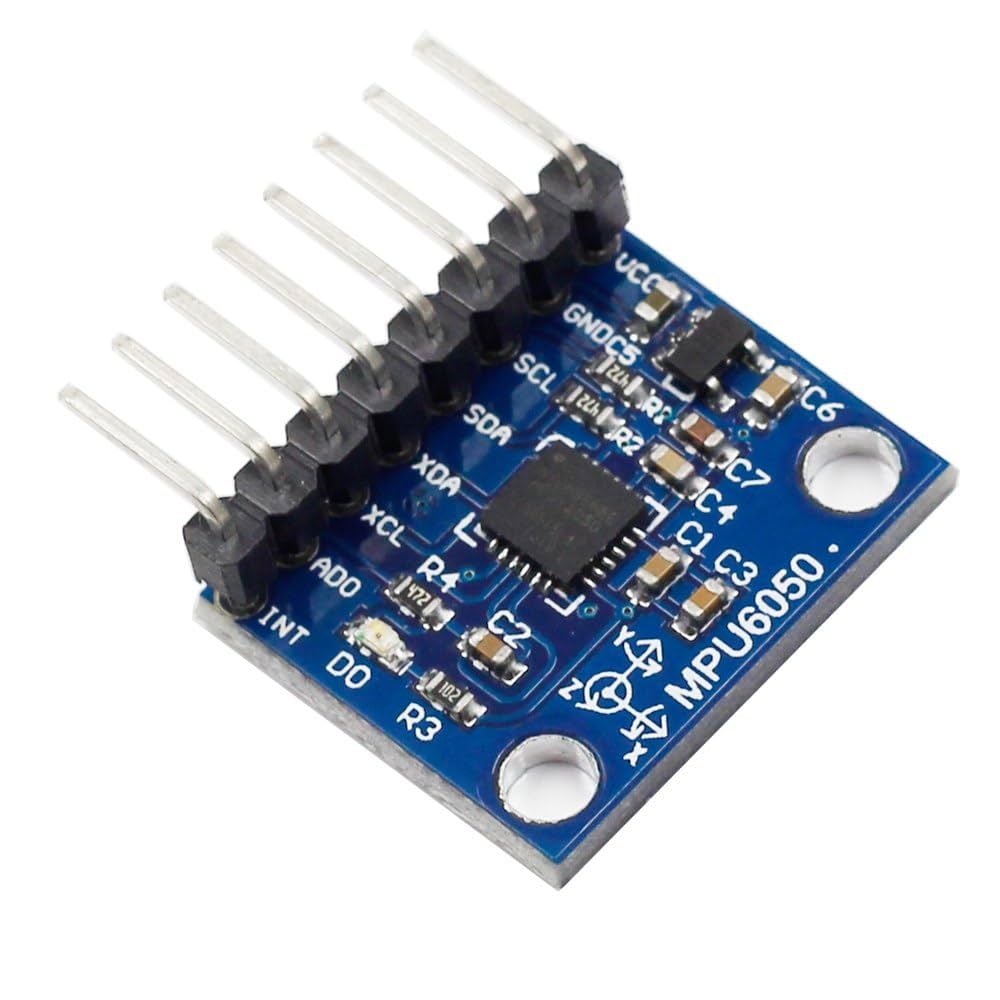
3-Axis accelerometer and 3-Axis gyroscope integrated on a single chip
debunked because it required a breadboard.
imagine holding a breadboard while curling.

#include "Wire.h"
#include "I2Cdev.h"
#include "MPU6050.h"
#include "WiFiS3.h"
#include "MQTTClient.h"
#include "math.h"
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
double start_degrees = -20;
double end_degrees = 20;
double degrees = 0;
int count = 0;
bool goingUp = false;
// 0 = dumbbell | 1 = Barbell
int mode = 1;
// mqtt setup from chatgpt
// ----------------- WiFi + MQTT -----------------
const char WIFI_SSID[] = "TestLab";
const char WIFI_PASSWORD[] = "11223344";
const char MQTT_BROKER_ADDRESS[] = "mqtt-dashboard.com";
const int MQTT_PORT = 1883;
const char MQTT_CLIENT_ID[] = "arduino-uno-r4-client";
const char MQTT_USERNAME[] = "";
const char MQTT_PASSWORD[] = "";
const char PUBLISH_TOPIC[] = "testtopic/Peemza";
const char SUBSCRIBE_TOPIC[] = "testtopic/Peemza";
WiFiClient wifiClient;
MQTTClient client(256);
unsigned long lastMsg = 0;
// ----------------- ฟังก์ชันเชื่อมต่อ Wi-Fi -----------------
void connectWiFi() {
Serial.print("🔌 Connecting to WiFi...");
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("\n✅ WiFi connected!");
Serial.print("IP Address: ");
Serial.println(WiFi.localIP());
}
// ----------------- ฟังก์ชันเชื่อมต่อ MQTT -----------------
void connectMQTT() {
Serial.print("🔗 Connecting to MQTT broker... ");
while (!client.connect(MQTT_CLIENT_ID, MQTT_USERNAME, MQTT_PASSWORD)) {
Serial.print(".");
delay(1000);
}
Serial.println("\n✅ Connected to MQTT broker!");
client.subscribe(SUBSCRIBE_TOPIC);
}
// from website
void messageReceived(String &topic, String &payload) {
Serial.println("Arduino UNO R4 - received from MQTT:");
Serial.println("- topic: " + topic);
Serial.println("- payload:");
Serial.println(payload);
if (payload == "mode=0") {
mode = 0;
Serial.println("switch to dumbbell");
} else if (payload == "mode=1") {
mode = 1;
Serial.println("switch to barbell");
}
}
// ----------------- setup -----------------
void setup() {
Serial.begin(9600);
Wire.begin();
mpu.initialize();
if (!mpu.testConnection()) {
Serial.println("❌ MPU6050 connection failed!");
while (1);
}
Serial.println("✅ MPU6050 Ready...");
connectWiFi();
client.begin(MQTT_BROKER_ADDRESS, MQTT_PORT, wifiClient);
client.onMessage(messageReceived);
connectMQTT();
delay(1000);
}
// ----------------- loop -----------------
void loop() {
client.loop();
if (!client.connected()) {
connectMQTT();
}
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
double pitch = atan2(-ax, sqrt((ay * ay) + (az * az))) * 180.0 / PI;
double roll = atan2(ay, sqrt((ax * ax) + (az * az))) * 180.0 / PI;
// https://samselectronicsprojects.blogspot.com/2014/07/getting-roll-pitch-and-yaw-from-mpu-6050.html
// Dumbbell Mode
if (mode == 0) {
degrees = pitch;
if (degrees > end_degrees && !goingUp) {
goingUp = true;
}
if (degrees < start_degrees && goingUp) {
count++;
goingUp = false;
sendMQTT();
}
}
// Barbell Mode
else if (mode == 1) {
if (az > 10000 && !goingUp) {
goingUp = true;
}
if (az < 7500 && goingUp) {
count++;
goingUp = false;
sendMQTT();
}
}
Serial.print("Mode: ");
if (mode == 0) {
Serial.print("Dumbbell");
} else {
Serial.print("Barbell");
}
Serial.print(" , Pitch: ");
Serial.print(pitch, 2);
Serial.print(" , Roll: ");
Serial.print(roll, 2);
Serial.print(" , az: ");
Serial.print(az);
Serial.print(" , Count: ");
Serial.println(count);
delay(200);
}
void sendMQTT() {
String payload = "{\"mode\":" + String(mode) +
",\"count\":" + String(count) +
",\"az\":" + String(az) + "}";
client.publish(PUBLISH_TOPIC, payload);
Serial.print("Sent to MQTT: ");
Serial.println(payload);
}